B. SVD方法场景拟合
第3-C章节说明使用太多参数会导致对参数PDF估计不佳 。本研究使用SVD来减少能够描述原始场景参数的数量 。本章节说明使用SVD方法后获得的参数对原始参数的近似情况 。
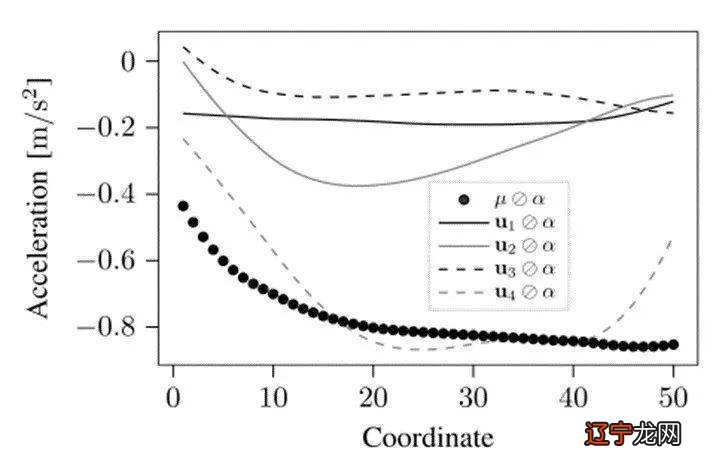
经过公式(7)近似后 , 缩放参数向量使用的前列的线性组合来近似 , 即 。图4和表1显示了LVD场景和U的前4列 。图4显示LVD场景平均以减速开始 , 以减速结束 。表1显示场景平均持续时间为4.73秒 , 前车平均初始速度为22.11km/h , 平均初始时间间隔为1.49秒 。由于每种情况都是通过图4和表1的值估计的 , 因此可以看出近似值不包含复杂的加速度曲线 , 意味着加速度将被平滑从而丢失部分细节 。平滑量取决于值 , 即用于逼近原始参数向量的U的向量数量 。选择值是一种权衡:值越大 , 平滑度越低 , 近似误差越小 , 但过大的值会导致参数PDF估计是出现问题 。
表1 3个附加参数经过缩放后和U前4列表征结果

文章插图
图5显示了五种LVD场景 , 分别对应跟随车辆最高的平均减速度 。1号线表示需要最高平键减速度的LVD场景 。表2中列出了的的数值 , 用于根据共公式(7)近似原始场景 。图5中的灰线显示LVD场景的近似速度 。表2显示了图5中五个场景的初始时间间隔 。这五个场景说明加速是平滑 , 但场景的主要特征是通过近似值得到的:平均减速度 , 场景持续时间 , 初始速度和初始时间间隔 。
文章插图
图4 LVD场景50个加速度参数经过缩放后和U前4列表征结果
表2 5个LVD场景跟随车辆的初始间隔及对应加速度

文章插图

文章插图
图5 五个LVD场景跟随车辆最高平均减速度 。黑线为观测值 , 灰线为基于d=4的近似值 , 表2列出相应的初始时间间隔
C. 生成场景参数
生成场景参数向量的一个重要方面为确定缩减参数的数量(d) 。一种方法是如公式(9)查看前个奇异值的解释方差 , 如表3所示 。表中前4个奇异值已经表明了LVD场景中90.4%的方差 , 因此可能是一个合适的选择 。图6显示了100个使用的参数生成的LVD场景中前车速度 。
表3 LVD场景解释方差-d值

文章插图

文章插图
图6 100个生成场景的前车速度
另外一种确认值的方法是根据公式(22)定义的SR指标 。图7展示了时应用SR指标的结果 , 以及经验Wasserstein指标 , 修正指标 , 。图7每一个点表示应用该指标200次时的中值 , 每次使用不同分区的训练数据和测试数据 。图7的中值标准差采用自举检验 , 等于或小于0.005[50] 。针对SR指标 , 修正使用进行加权 , 在第5-E章节证明其是合理的 。

文章插图
图7 生成的LVD场景参数集的指标中值
图7中最左边的电表示训练数据集X直接用于对场景采样 , 是从 中替换 个场景的选择 , 即
(24)
其中表示边界为1和的连续均匀分布 。直接将训练数据用于“生成场景”会导致低数值经验Wasserstein指标 , 缺点是生成的场景之间没有太大的变化 , 因此修正值也是最高 , 导致 。当时 , 与直接使用训练集对比 , 经验Wasserstein指标大致相似 。由于从KDE中对场景参数进行采样 , 生成的场景比训练集包含更多的变化 , 导致修正值较低 。因为进一步增加值会导致更高的指标评估 , 因此似乎是正确的选择 。
以上关于本文的内容,仅作参考!温馨提示:如遇专业性较强的问题(如:疾病、健康、理财等),还请咨询专业人士给予相关指导!
「辽宁龙网」www.liaoninglong.com小编还为您精选了以下内容,希望对您有所帮助:- 什么是自动清算所
- 近万元的匹克鞋!《流浪地球》加持,3D技术+自动系带,匹克芜湖起飞?
- 汽车年检需要多少钱 年检需要多少钱
- 北京汽车过户需要什么手续 2022年详细流程
- 汽车保险怎么买?
- 汽车如何检修正时链条和链轮?
- 1 考虑关于清洁空气和汽车运输来自的生产可能性边界。 解释为什么未被管制的汽车尾气污染会使国婷间解语可都稳陆甚将民经济处在生产可能性之内...
- 机械设计制造与自动化专业具体学习什么课程?
- 养车小知识,汽车保险怎么买合适?
- 预付费智能电表一户一表、远程自动抄表、电费预充值-安科瑞黄安南